 测速传感器: 测速传感器:
利用钢铁材料(或其它导磁材料)做的齿轮、齿条的运动,产生磁通量的变化,通过SMR敏感元件获得信号,来测量物体的平动或转动。特点是分辨率高,频响宽,可靠性高,内装放大整形电路,输出为幅度稳定的方波信号, 能实现远距离传输。用于测量转速、位移、速度、长度、扭矩以及精密定位。广泛应用于机械、冶金、石油、化工、交通、铁路、航 空、自控、军工等各个领域。
特请注意:本产品可以制成带双路相位差输出信号的传感器,
用于判别运动方向。也可以制成微功耗的传感器,用于流量测量。
技术特点:
|
工作电压 |
12V DC (或5-24V) |
响应频率 |
OHz~15KHz(位置型);0.3Hz~25KHz |
|
输出信号 |
方波(高电平:近似电源电压或按用户要求,低电平:<0.3V) |
使用温度 |
-25℃~80℃(一般)-40℃~125℃(特殊) |
|
输出电流 |
≤30毫安 |
保护形式 |
有极性和短路保护 |
|
触发形式 |
钢铁齿轮齿条等 |
绝缘电阻 |
≥50MΩ |
|
分辨模数 |
≥0.5 |
适用温度 |
≤0.95%RH |
|
作用距离 |
正比于齿高,最远可达5mm,高速和极低速距离应近 |
判向功能 |
无(单路,型号-P);有(双路,型号-D) |
|
测量精度 |
±一个脉冲 |
外壳材料 |
金属镀铬或壳铝 |
|
输出接口方式 |
可选择PNP型,NPN型或TTL型、 |
选型指南:
π -(后跟具体工作电压),如24:表示工作电压24V;默认为12V。
P: 单路 D: 双路输出 T: 特殊型
L: 导线输出 H : 航空插头输出
外径的螺纹尺寸,如12:表示 M12, 螺距为1(有
M10×1,M12×1,M14×1,M16×1,M18×1,M18×1.5)
商标 后加H(W)分别表示用永(导)磁体触发的位置传感器
型号尺寸表
型号 |
尺寸 |
出线方式 |
π10L、πW10L、πH10L |
M10×1,长50 |
|
| π12L、πH12L、πW12L 、π12LD |
M12×1,长60 |
πW12L |
M12×1,长55 |
| π14L、πW14L、πH14L、πW14LD |
M14×1,长60 |
| π16L、πW16L、πH16L、πW16LD |
M16×1,长60 70 75 |
| π18L、πW18L、πH18L、πW18LD |
M18×1,长65 |
| πW18(1.5)L、πW18(1.5)LD |
M18×1.5,长65 |
π16H、πW16H、πW16HD |
M16×1,长80 |
航插输出
|
| π18H、πW18H、πH18H、 πW18HD |
M18×1,长60 70 |
|
πW18(1.5)★H、πW18(1.5)★HD
注(1.5)★表示螺径尺寸是1.5mm
|
M18×1.5,长70 |
外形尺寸及安装示意图
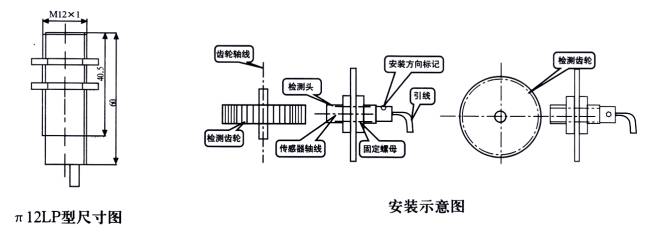
安装说明
1 安装距离d 离齿面1 mm 安装前应先检查齿轮转动的偏心情况以免当偏心超过安装距离时传感器及敏感头将会被齿轮打到, 损坏, 产生意外齿轮模数少(齿窄时) 安装距离要近在保证安全的条件下距离d 越小传感器工作越稳定
2 安装的方向性: 安装标记红点和传感器直径连线应与测速轮运动方向垂直或与齿轮轴的轴向(轴线)方向平行
|